After 3 months of development, we're glad to announce the availability of KStars 3.4.3 for Windows, MacOS and Linux.
Let's check out the highlight of this release!
It is useful for users who do not have a motorized focuser and prefer to focus manually with the aid of the mask. After capturing an image in the focus module with the Bahtinov mask algorithm selected, Ekos would analyze the images and stars within it. if Ekos recognizes the Bahtinov star pattern, it will draw lines over the star pattern en circles on the center and on an offset to indicate the focus.
Florian Signoret added support for triggering autofocus procedure when the temperature exceeds a certain delta threshold in the capture module. The temperature is sourced primarily from the focuser itself, and in unavailable, then it falls back to the weather station, if any.

Previously Ekos Mount module supported enforcing Altitude limit for the mount motion. The mount is active stopped if its slew or track past there limits. Chris Rowland added the Hour Angle (HA) limits to prevent limit the mount from slewing and/or tracking past there limits. This can protect the equipment in case of a runaway motion that might lead a pier collision.

Hy Murveint contributed significant new features and improvement to the Ekos Internal Guider.

The colored dots (same color scheme as the internal guider) shows the RA and DEC samples on their way out, and the small white and yellow circles show their return paths.
phdlogview is a program written by Andy Galasso to analyze PHD2 logs. It's very nice. I've tried to have the internal guider output a mostly compatible log file so that if you installed phdlogview, you could use it to also browse your logs from the Ekos internal guider. A few things to note:
The logs are placed in a directory parallel to the standard KStars logs directory. Instead of logs, it is guidelogs. So, for example, on Linux you'd find them in this directory ~/.local/share/kstars/guidelogs/
You can turn on/off this logging by going into the Options menu on the internal guider tab, clicking on the Guide tab on the left and checking/un-checking the box labeled "Save Internal Guider User Log".
There are many features in phdlogview. Explore and look at Galasso's documentation for how to use it.
New Bahtinov Mask Focus Assistant
Patrick Molenaar added a long requested feature: The Bahtinov Mask focus assistant tool. Users can activate the new algorithm in the Focus module.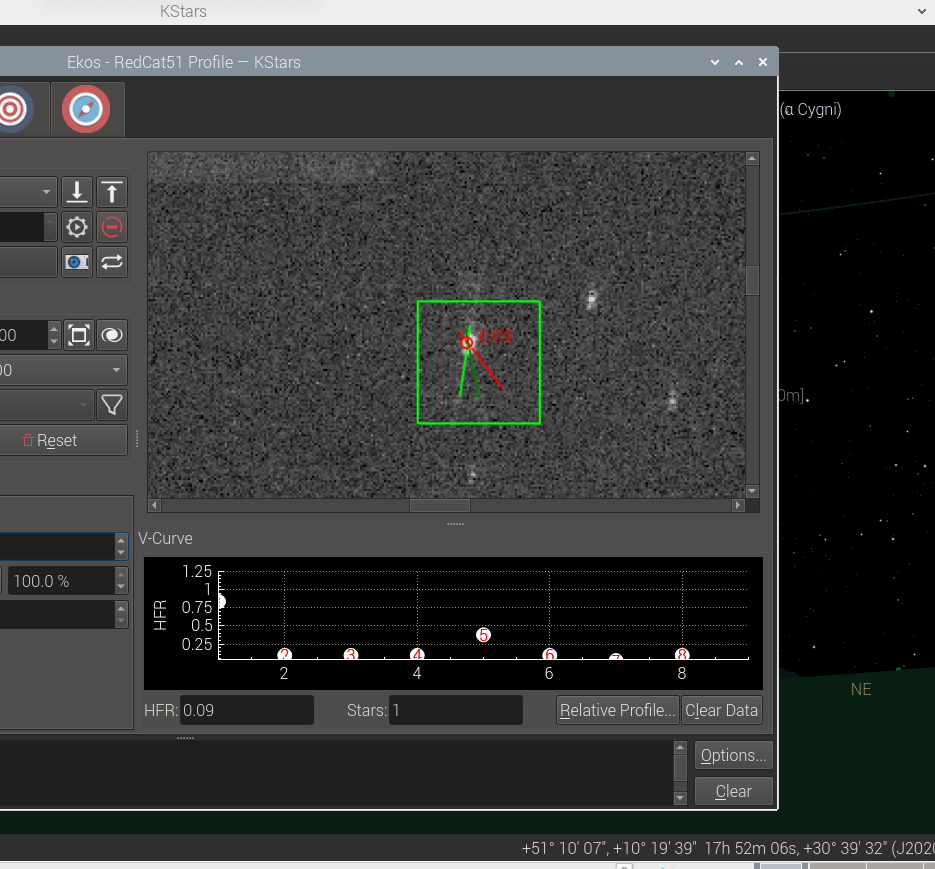 |
| Focus Bahtinov Assistant Tool |
It is useful for users who do not have a motorized focuser and prefer to focus manually with the aid of the mask. After capturing an image in the focus module with the Bahtinov mask algorithm selected, Ekos would analyze the images and stars within it. if Ekos recognizes the Bahtinov star pattern, it will draw lines over the star pattern en circles on the center and on an offset to indicate the focus.
Autofocus on Temperature Change
Florian Signoret added support for triggering autofocus procedure when the temperature exceeds a certain delta threshold in the capture module. The temperature is sourced primarily from the focuser itself, and in unavailable, then it falls back to the weather station, if any.
Focus Logs
Doug Summers added a dedicated focus logger to help users analyze their autofocus runs to better understand their behavior and improve them in the future.
Camera Driver Restart
An experimental camera driver restart feature was added to the capture module. It should be used as a last resort option in case the camera driver is unresponsive. This feature commands the INDI server to only restart the camera driver without affecting any other drivers, so you don't have to shutdown the whole INDI server if one driver misbehaves.

Restarting a camera driver might lead to quite a few complicated since it interacts with many subsystems in Ekos. Therefore, it is flagged as experimental in this release pending user feedback.
Mount Hour Angle Limits
Previously Ekos Mount module supported enforcing Altitude limit for the mount motion. The mount is active stopped if its slew or track past there limits. Chris Rowland added the Hour Angle (HA) limits to prevent limit the mount from slewing and/or tracking past there limits. This can protect the equipment in case of a runaway motion that might lead a pier collision.
Filter Names Editor

A simple, but convenient editor was added in Capture module to edit filter names. Previously, you had to change filter names directly in INDI Control Panel which was not intuitive for quite a few users.
Internal Guider Features
Hy Murveint contributed significant new features and improvement to the Ekos Internal Guider.
New Detection Algorithm: SEP MultiStar
This is a new guide-star detection, tracking & drift computation algorithm.

You can select this in the Guide options menu (click Options... in the lower right corner of the Guide tab), and then click on "Guide", and then choose from the "algorithm" menu. There choose the guide-star detector. (e.g. there choices include Smart, SEP, Fast, ...). Try SEP MultiStar. It is more stable in all three respects (guide star selection, detection and drift calculation). You may not notice much difference in a normal guiding session when things are going well, except, perhaps, better choice of a guide star.
GPG RA Guiding: New control algorithm for RA guiding.
Hy added a new guiding algorithm. This is for RA only--that is, guiding for DEC still happens, but using the existing guiding algorithms. This guider is based on the work in this PhD thesis and is the same as the well-regarded PHD2 guide algorithm known as Predictive PEC. You will see Copyright 2014-2017 Max Planck Society, now in the KStars credits for this system. It estimates the periodic error in the guiding system, and tries to fix it before it happens. This system should perform about the same as the standard guider for the first period or two of your mount's periodic error, then improve. When using this system, it's best to set in advance what your mount's worm-gear period is. For example, the Orion Atlas pro is about 480s. You enable this in the Guide options menu, in the GPG RA tab, and then checking "Enable GPG". There are other parameters you can change, but as indicated earlier, the main one to think about is "Major Period".Graphics Improvements
- Added a guide-star SNR plot. This can be useful, e.g. when the SNR starts taking a dive, you know things aren't going well, perhaps a cloud is passing by.
- Added a plot of the RMS error (i.e. RA and/or DEC arc-second error RMS-averaged over the past 50 guiding samples).
- Separated the zooming for x and y axes. You can use '+' and '-' buttons below the x-axis to change the time scale of the plot (number of minutes plotted), and you can use the mouse scroll (same as before) to zoom in/out of the Y-axis. When you mouse-over the plot, you can see all the values for the different graphs.BTW, in case you didn't know (this isn't something I changed), you can change the amount of space allocated to the drift plot (the circle) and the drift graph by placing your mouse over the short dotted line between them and dragging left of right.
Calibration Backlash Removal
A backlash removal section was added to the "calibration dance". Before it starts calibrating DEC, the Ekos guider will now take 5 DEC steps, without measurement, to make sure there's no backlash in the DEC gears. This should improve the quality of the calibration, however, if you don't like this, you can remove it by unchecking "Remove DEC backlash in guide calibration" in the Guide options menu, in the "Calibration" tab there.
Basically, if things are going well, it should display dots in two lines which are at right angles to each other--one when the calibration pushes the mount back and forth along the RA direction, and then when it does the same for the DEC direction. Not a ton of info, but can be useful to see. If the two lines are at a 30-degree angle, something's not going well with your calibration! Here's a picture of it in action using the simulator
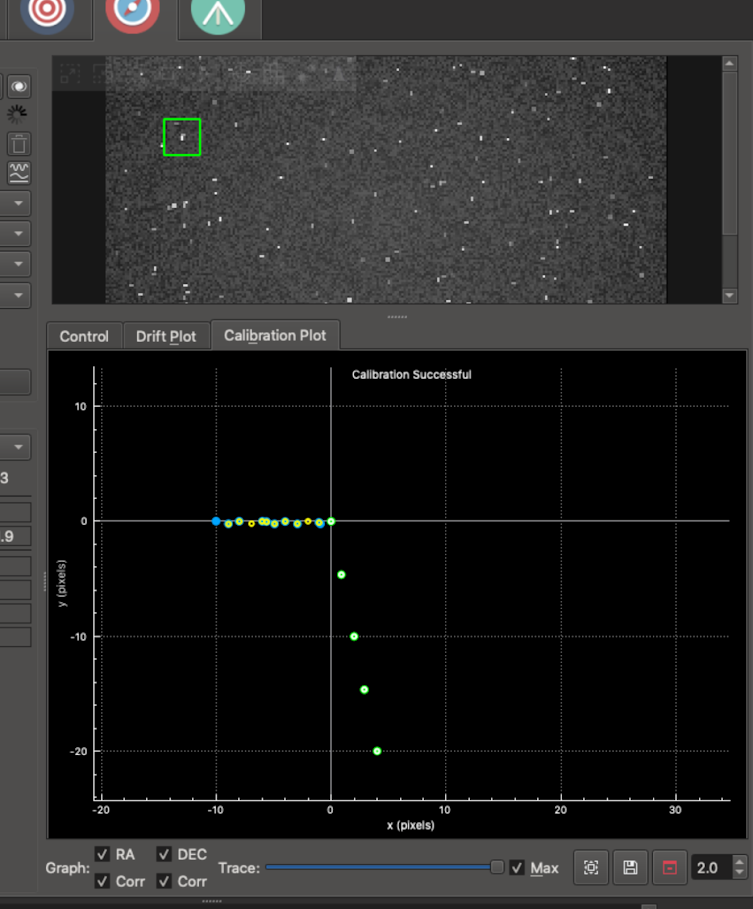
Calibration Plot
A Calibration Plot subtab was added to the right right of the Drift Plot. It shows the mount positions recorded during internal-guider calibration.Basically, if things are going well, it should display dots in two lines which are at right angles to each other--one when the calibration pushes the mount back and forth along the RA direction, and then when it does the same for the DEC direction. Not a ton of info, but can be useful to see. If the two lines are at a 30-degree angle, something's not going well with your calibration! Here's a picture of it in action using the simulator
The colored dots (same color scheme as the internal guider) shows the RA and DEC samples on their way out, and the small white and yellow circles show their return paths.
PHDLogView compatibility
phdlogview is a program written by Andy Galasso to analyze PHD2 logs. It's very nice. I've tried to have the internal guider output a mostly compatible log file so that if you installed phdlogview, you could use it to also browse your logs from the Ekos internal guider. A few things to note:
The logs are placed in a directory parallel to the standard KStars logs directory. Instead of logs, it is guidelogs. So, for example, on Linux you'd find them in this directory ~/.local/share/kstars/guidelogs/
You can turn on/off this logging by going into the Options menu on the internal guider tab, clicking on the Guide tab on the left and checking/un-checking the box labeled "Save Internal Guider User Log".
There are many features in phdlogview. Explore and look at Galasso's documentation for how to use it.
PHD2 Integration Fixes
Eric Dejouhanet significantly improved fault tolerance during PHD2 interactions. This includes the following situations.

Check out the complete changelog for more details.
- Star does not move enough for calibration to complete. PHD2 may:
- be looping instead of calibrating, while still notifying calibration.
- abort but continue to send guide steps and frames.
- => Fixed: calibration failures are now properly handled in that situation, and forwarded to Guide module.
- Star disappears because of a mount glitch. PHD2 may:
- declare star lost and stop without further notice.
- => Fixed: star-lost notification is now properly handled, and will time out properly (and not restart).
- Device disconnects briefly. PHD2 may:
- declare device unusable, eventually after some time (camera timeout is 15s by default), requiring reconnect.
- => Fixed: equipment dis/connection is now properly handled from both sides, aborts operations and is robust.
- KStars/Ekos crashes while guiding and is restarted using the existing indiserver.
- The currentCCD may be null when restoring connection, upon call to executeOneOperation.
- AppState has to be taken into consideration to restore state as it was before the crash.
- => Fixed: app-state polling improves robustness, requires up-to-date INDI build.
- If Ekos is told the equipment is disconnected, it will consider an external cause and will not attempt to reconnect.
- Ekos will not reconnect, to allow manual intervention is required on PHD2 side.
- Ekos will detect reconnection and change state automatically.
- However PHD2 v2.6.8 crashes when INDI drivers are killed, so no solution except restarting PHD2 in a loop (use systemd).
- One issue remains in Guide, where the stop button remains enabled sometimes (regression?).
- May not fix in the context of this MR.
- One issue remains upon server loss, which triggers perpetual reconnect unless the end-user disconnects manually.
- Issue related to state kept at disconnected.
New LED indicators were added for each stage as a visual feedback for the user.
Other Fixes
- Almanc batch output date fixed.
- Code refactoring unifying capture initialization for new sequences and continuing of sequences
- Internal guider didn't take binning into account when computing arc-seconds.
- Fix issue with Meridian Flip Retry.
- Add function to get UTC datetime from DATE-OBS header field.
- Allow for the case where the mount uses the pointing state early.
- Added profile name uniqueness requirement.
- Bugfix for correct activation of dome and weather UI.
- Major refactoring of refraction corrections that fixes some bugs.
- Add explicit offset control. Separate ISO and Gain controls.
Check out the complete changelog for more details.
3 comments:
This is a great update with a lot a added features !
And the simulator is now working again on Mac.
Thanks !!!
Is it included in latest Stellarmate issue?
Does this update mean I no longer need to use a Raspberry Pi as an intermediate to use KStars on my Windows laptop? Forgive me, I'm not very smart with this stuff.
Post a Comment