KStars v3.6.8 is released on 2023.12.03 for Windows, MacOS & Linux. It's a bi-monthly bug-fix release with a couple of exciting features.
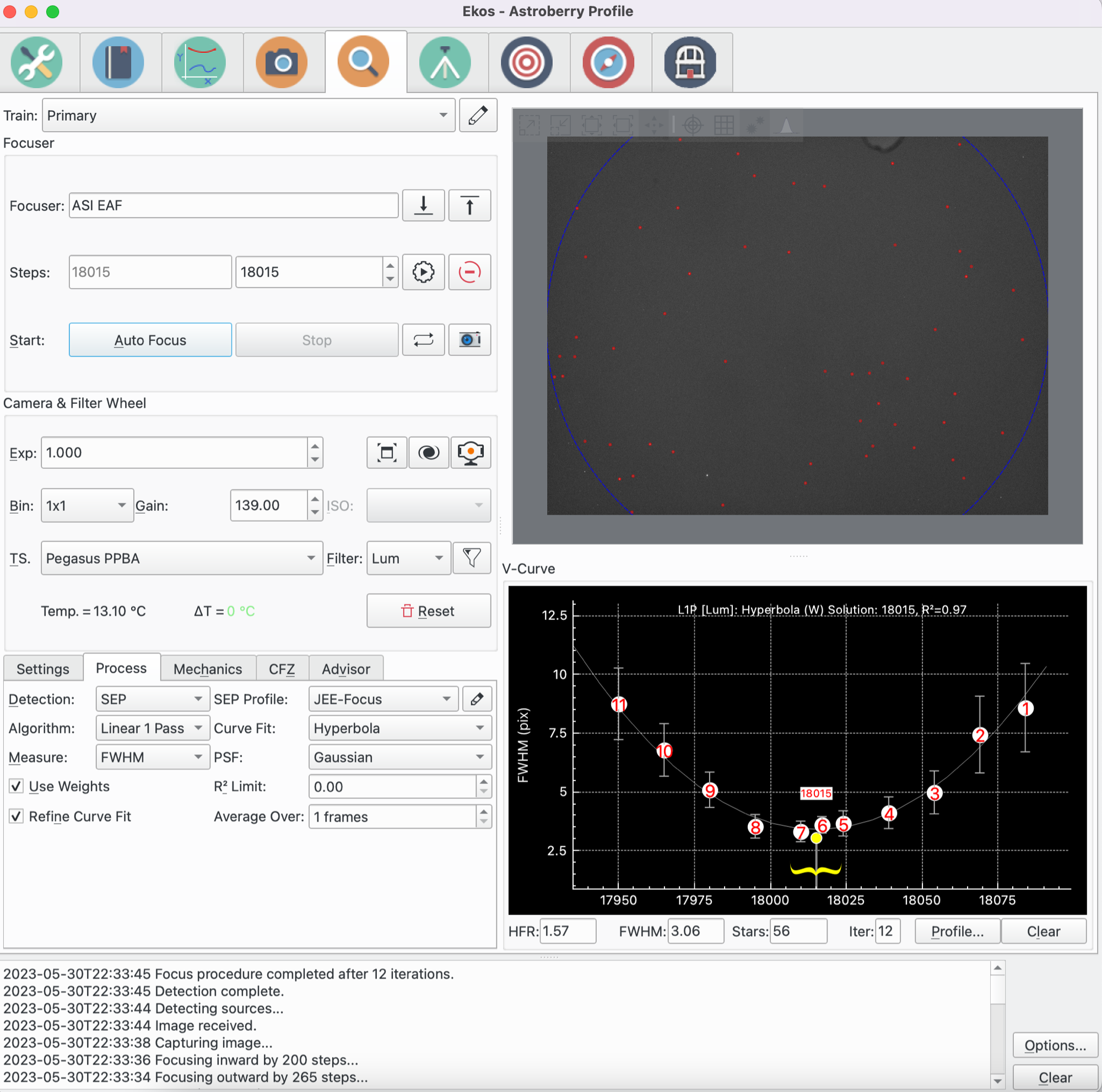
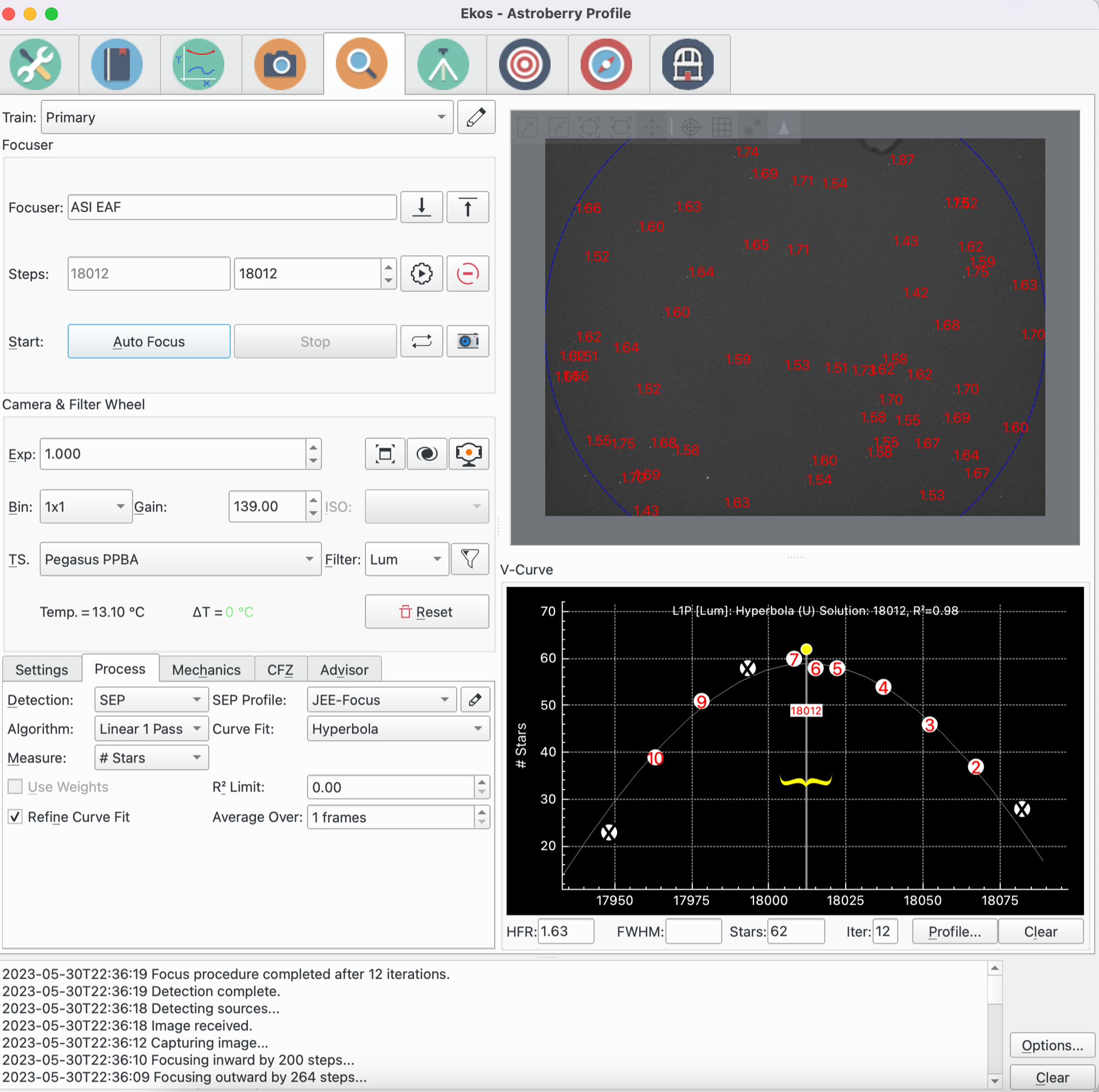
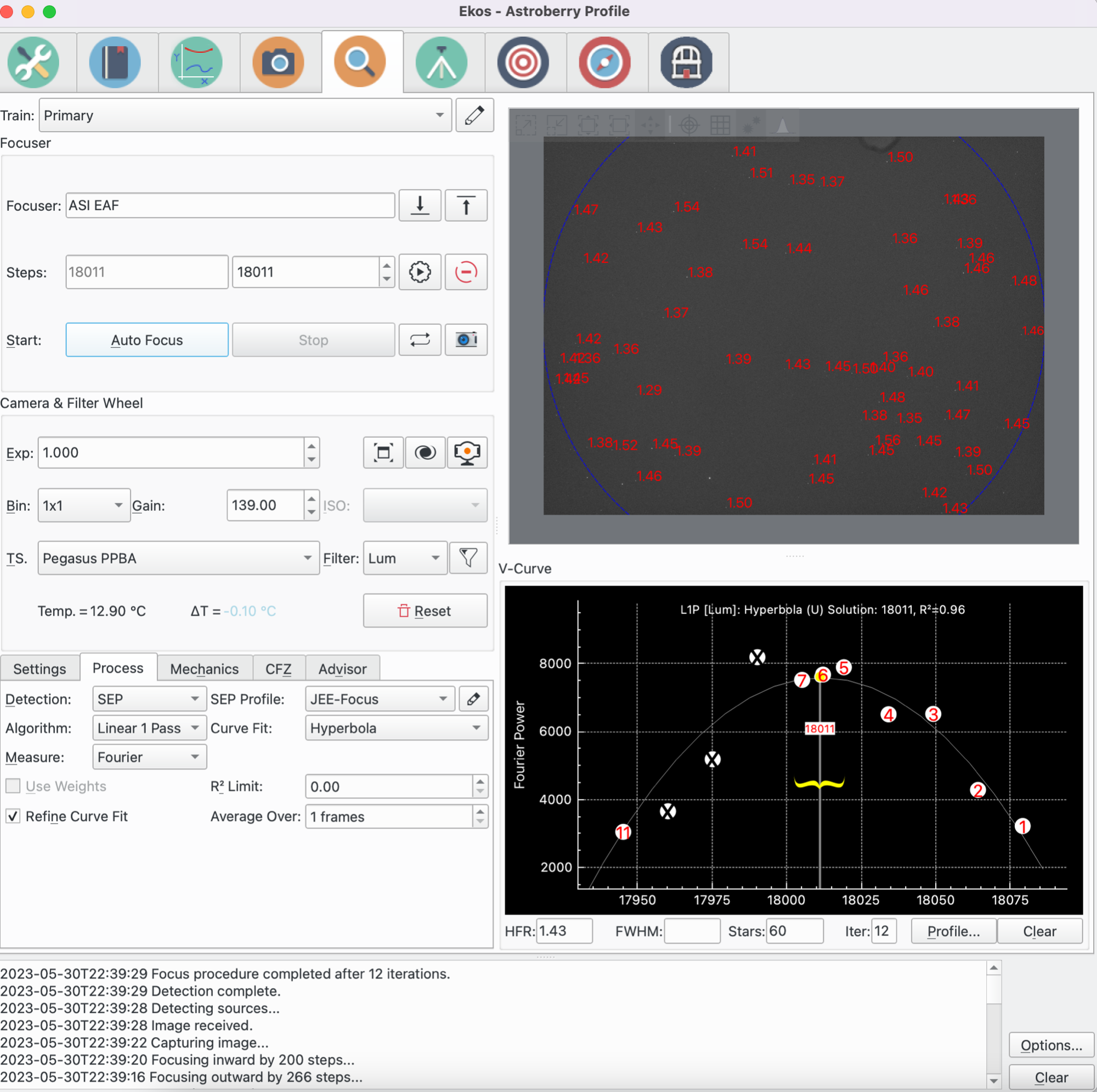
Aberration Inspector

The information is then used to analyze:
- Back focus.
- Sensor Tilt.
- V-curve for the each tile.
- Table of data detailing the curve fitting results.
- Analysis of back focus and tilt.
- 3D Surface graphic to explain the Petzval Surface intersection with the sensor.
Sub-exposure Calculator

A new experimental graphical tool to determine an appropriate number of sub-exposures for integration was added. This tool allows the selection of an exposure time to noise ratio for a stacked image; the tool will compute the number of sub-exposures required to achieve that value.
Added several new camera data files:
- Atik-16200CCD_Mono.xml
- FLI-16200CCD_Mono.xml
- QHY_CCD_294M_Pro.xml
- QHY_CCD_461_PH.xml
- QHY_CCD_163C.xml
- QHY_CCD_163M.xml
- QHY_CCD_268C.xml
- QHY_CCD_294M.xml
- QHY_CCD_600_PH.xml
- ZWO_CCD_ASI294MC
- Pro.xml ZWO_CCD_ASI294MM
- Pro.xml ZWO_CCD_ASI533MC
- Pro.xml ZWO_CCD_ASI2600MC
- Pro.xml ZWO_CCD_ASI6200MC
- Pro.xml ZWO_CCD_ASI533MC
- Pro.xml ZWO_CCD_ASI533MM
- Pro.xml Nikon_DSLR_DSC_D5100_(PTP_mode).xml Nikon_DSLR_DSC_D700_(PTP_mode).xml
FITSViewer Solver
The FITS Viewer Solver is used to plate-solve the image loaded in the FITS Viewer's tab. It only works with the internal StellarSolver. You get the RA and DEC coordinates for the center of the image, the image's scale, the angle of rotation, and the number of stars detected in the image. Its main use case is debugging plate-solving issues in Ekos, though the information displayed can be generally useful. The controls and displays are described below.
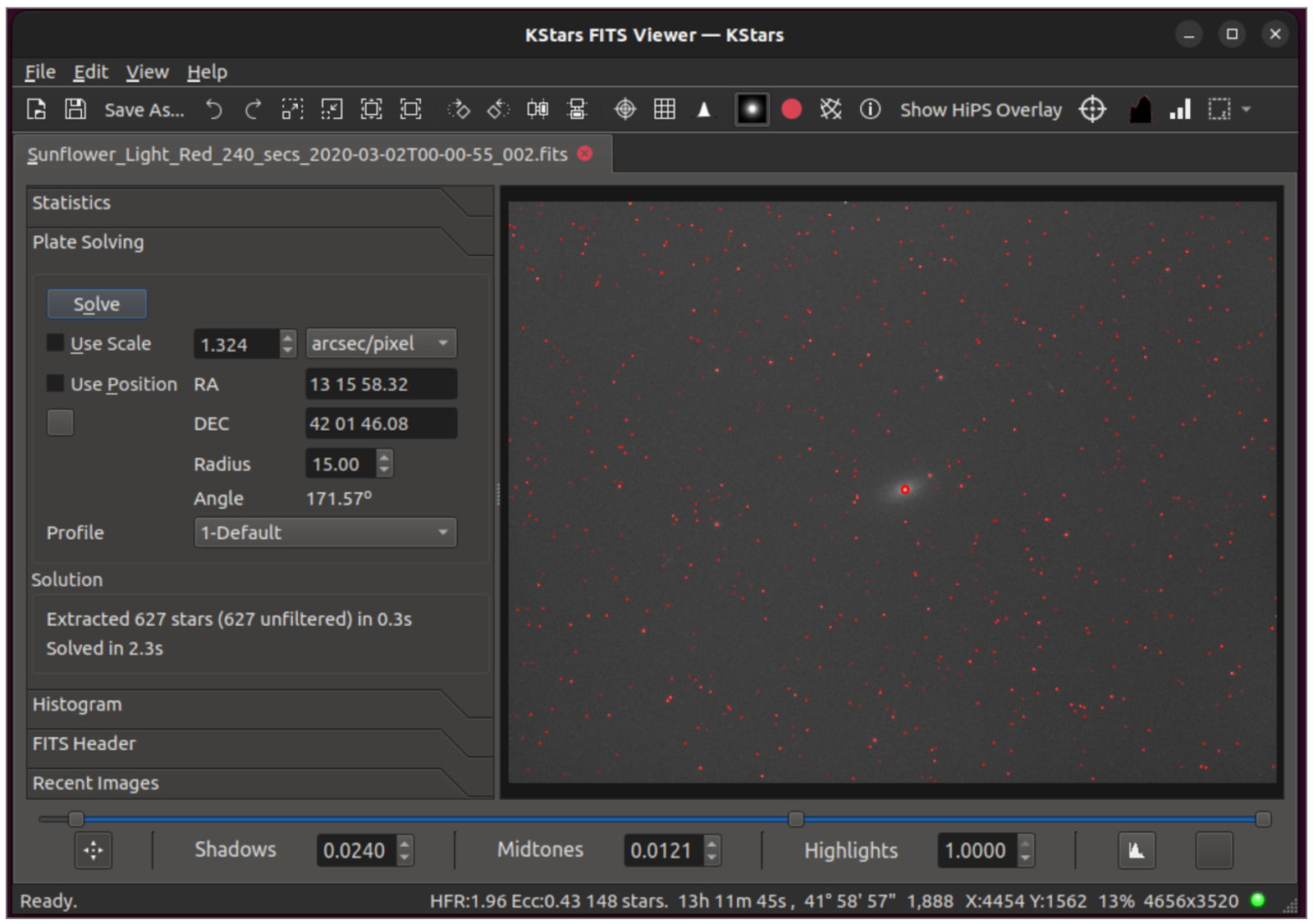
This adds a new tool inside the splitter on the FITS Viewer. It plate-solves the displayed image, and allows the user to experiment with a number of plate-solving parameters, and thus help debug plate-solving issues.
This adds a new tool inside the splitter on the FITS Viewer. It plate-solves the displayed image, and allows the user to experiment with a number of plate-solving parameters, and thus help debug plate-solving issues.
How to test it out?
- Open the sliding panel on the left part way, click on Plate Solving, and resize the windows appropriately.
- Experiment with the parameters available (Use Scale, Use Position, the scale and RA/DEC positions, choose a profile and/or edit it)
- Click Solve, and the image is solved and the solution presented in the Scale and RA & DEC and Angle boxes.
- If you enable "Mark Stars" above the image window, you will also see the stars that were detected.
Quality of Life improvements
- Make "Set Coordinates Manually" dialog more intuitive.
- Telescope name specified in the optical trains are now saved in the FITS header (the mount name was saved before).
- New placeholders for ISO, binning and pure exposure time added.
- Add a new not-default scheduler option to disable greedy scheduling.
- Reduce latency between captures, especially when guiding / dithering.
- Fix issue with differential slewing.
- Separate Business Logic from UI in Scheduler.
- Fix bug in estimating job time, capture delays were misinterpreted.
- Fixed guide start deviation was not saved properly in esq file.
- Bugfix in one-pulse dither. Dither pulses were going the wrong way.
- Fix Scheduler hangs when Focus does not signal Autofocus start failure.
- Focus Guide Settle Bug.