I'm glad to announce KStars first release of 2019: v3.1.0 for MacOS, Linux, and Windows. This release focuses on improvements to stability & performance of KStars. In 3.0.0, we introduced quite a few features which resulted in a few regressions that we worked hard to iron out in this release.
Eric Dejouhanet fixed a few bugs with the Ekos Scheduler along with making steady improvements to cover all corner cases for multi-object multi-night scheduling which can become quite complex.
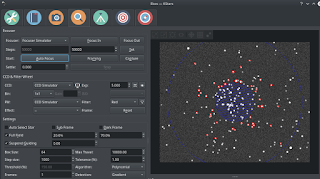
Eric also added a new feature to the Focus module: Ring-field focusing. This method limits the area which stars are detected between an inner and an outer ring. This can be useful in images where
galaxies or nebulaes can be mistaken as stellar object which often lead to erroneous HFR reporting.
This can only be used for full-field focusing.
Wolfgang Reissenberger migrated the Meridian Flip handling code to the Ekos Mount tab. This makes meridian flip possible even if there is no capture process going. If the mount is tracking and passes the meridian, it can be triggered to flip now in the Mount Module.
Yuri Chornoivan migrated online Ekos documentation to KStars official documentation. This was a tremendous effort due to the volume of the documentation data involved. Now Ekos documentation are properly managed by us in KDE and should get translations like the rest of the official documentation.
Sebastian Neubert introduced manual workflow for users who would like to use Ekos Polar Alignment Assistant Tool with manual non-GOTO mounts. Now the users are prompted to rotate the mount when it is required to do so until the process is complete. This is Sebastian's first code contribution to KStars, welcome to the team!
Robert Lancaster developed a comprehensive script along with detailed documentation for building KStars with Craft on MacOS. This enables users to wish to either develop for KStars or use the latest bleeding edge versions from trying it out with a single script that pulls all the sources and compile them accordingly with the aid of KDE's spectacular Craft technology.
The LiveView window received a few enhancement to enable zooming and panning for supported DSLR cameras.
Ekos Scheduler
Eric Dejouhanet fixed a few bugs with the Ekos Scheduler along with making steady improvements to cover all corner cases for multi-object multi-night scheduling which can become quite complex.
Ring-Field Focusing
Eric also added a new feature to the Focus module: Ring-field focusing. This method limits the area which stars are detected between an inner and an outer ring. This can be useful in images where
galaxies or nebulaes can be mistaken as stellar object which often lead to erroneous HFR reporting.
This can only be used for full-field focusing.

Meridian Flip
Wolfgang Reissenberger migrated the Meridian Flip handling code to the Ekos Mount tab. This makes meridian flip possible even if there is no capture process going. If the mount is tracking and passes the meridian, it can be triggered to flip now in the Mount Module.
Ekos Documentation
Yuri Chornoivan migrated online Ekos documentation to KStars official documentation. This was a tremendous effort due to the volume of the documentation data involved. Now Ekos documentation are properly managed by us in KDE and should get translations like the rest of the official documentation.
Ekos PAA for Non-GOTO mounts
Sebastian Neubert introduced manual workflow for users who would like to use Ekos Polar Alignment Assistant Tool with manual non-GOTO mounts. Now the users are prompted to rotate the mount when it is required to do so until the process is complete. This is Sebastian's first code contribution to KStars, welcome to the team!
MacOS Build Script
Robert Lancaster developed a comprehensive script along with detailed documentation for building KStars with Craft on MacOS. This enables users to wish to either develop for KStars or use the latest bleeding edge versions from trying it out with a single script that pulls all the sources and compile them accordingly with the aid of KDE's spectacular Craft technology.
DSLR LiveView
The LiveView window received a few enhancement to enable zooming and panning for supported DSLR cameras.
Other Fixes & Improvements
- The FITS Viewer window is now automatically raised to the foreground when a new image arrives.
- Dark Library now considers all DSLRs to be shutterless.
- Mounts are grouped by manufacturer in the Equipment Profile Editor.
- Preliminary support for websocket to INDI::CCD on the client side.
- DBus interface expansion to provide more fine control over KStars.
- Fixed relative focuser bug in autofocus mode.
- Improved multi-channel histogram by providing dedicated controls to each channel.
- Fixed Auto-Stretch affecting raw image values.
- Support for compressed FITS (*.fits.fz) in INDI. This can cut the transmission time to 30%!
- Improved display of Parked status.
- KStars defaults to limited resource mode on ARM architecture.
- When there is binning change, always FORCE setting of frame values even if they did not change



